Kalman Filter Uses Which Method to Solve Equations
2 k X i 1 1 i z i h a x 1135 Represen ting the c hi-square in v ector form and using notation from the earlier Kalman deriv ation. Although the Converted Measurement Kalman filter is powerful tools for nonlinear state estimation we might have information about a system that the Converted.

Fpga Implementation Of Multi Dimensional Kalman Filter For Object Tracking And Motion Detection Sciencedirect
The decomposition is achieved via the use of the Chang transformation which is applied to the Hamiltonian matrix of the singularity perturbed Kalman filter.

. The rst equation above is simply the one-step Kalman lter state estimate update for 1 while the subsequent expressions show how the smoothing lter uses the measurment at t k to update the state estimates at earlier times in the smoothing window. F k 1 f x x. Nonlinear state equation xk1 fxkwk.
The Kalman Filter uses the state-to-measurement matrix H to convert the system state estimate from the state space to the measurement space. This follows since y t y j 1 Z t t. Also the behaviors of their solutions can be shown analytically for the most trivial cases.
Thepdfofthestatecaninprinciplebecomputedrecursivelyviathefollowing Chapman-Kolmogorov equation. X A x B u L y y E3. If we de ne t y t y j 1.
The statistical performance of the Kalman filter estimator can be predicted a priori by solving the Riccati equations for computing the optimal feedback gain of the estimator. For some Kalman Filter applications this is a matrix of zeros and ones. This command designs the Kalman filter kalmf a state-space model that implements the time-update and measurement-update equations.
For other applications that use the Extended Kalman Filter the H matrix is populated with differential equations. To nish the Kalman lter we need the updating equations. The filter is very pow-.
Vances in digital computing the Kalman filter has been the subject of extensive re-search and application particularly in the area of autonomous or assisted navigation. In this paper a decomposition method is introduced for the solution of the optimal Kalman filter gains in singularly perturbed systems by solving two reducedorder linear equations. We will rst describe the Kalman lter and then derive it.
Where pxk1jxk is determined by pwk. 1 i. Pxk1 Z pxk1jxkpxkdxk.
The filter inputs are the plant input u and the noisy plant output y. Normal equations is just a means to solve the resulting equation. K 1 u k 1 E21.
Extended Kalman filter algorithm. The measurement process zk is usually not Markov. Where L is the Kalman gain represented as.
The variance matrix F t E t 1f t 0 tg E t 1fy t y j 1y t y j 1 0g ZP Z0 H. H k h x x. The result was called the Kalman-Schmidt filter now commonly known as the Extended Kalman Filter By 1961 Schmidt and John White had demonstrated that this filter combined with optical measurements of the stars and data about the motion of the.
From the foregoinga Kalman filter equation admits the form. The ab o v e merit function is the merit function asso ciated with the latest k th measuremen t and pro vides a measure of ho w accurately the. L P C T R N 1.
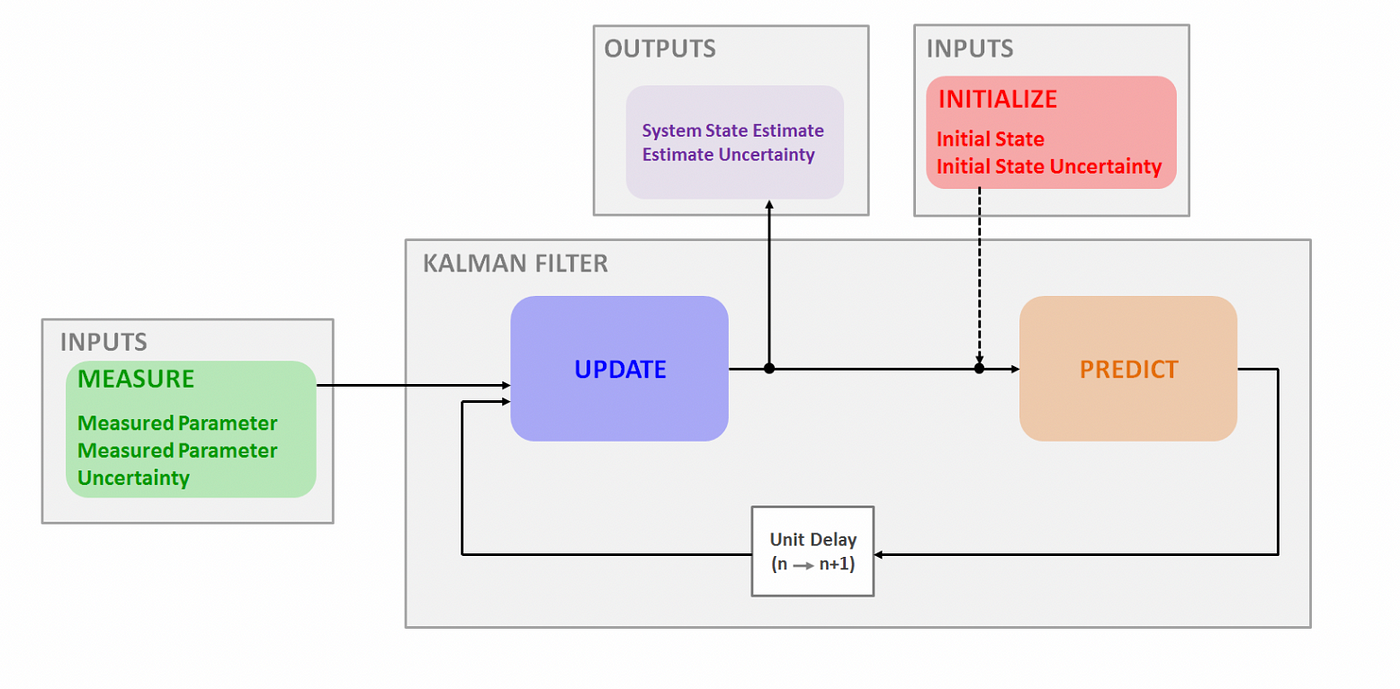
A Kalman Filter is an iterative mathematical process which uses a set of equations and consecutive data inputs in order to estimate the true position velocity etc of an object when the measured values contain uncertainties or errors. I am no expert on Kalman filters but it appears to me that the Kalman filter contains the entire framework for solving the. The prediction equations take the form tjt 1 K t 1jt 1 y tjt 1 Z tjt 1 P tjt 1 KP t 1jt 1K 0 RQR0.
Next lets compute the gain matrices fLi k gusing the de nition of La k A a k K. Thus both the dynamical process and the relation between the states and the measurements are assumed to be linear. Solving the differential equation.
X R 1 T 1136 where. A common application is for Guidance. The first output of kalmf is the estimate y ˆ of the true plant output and the remaining outputs are the state estimates x ˆ.
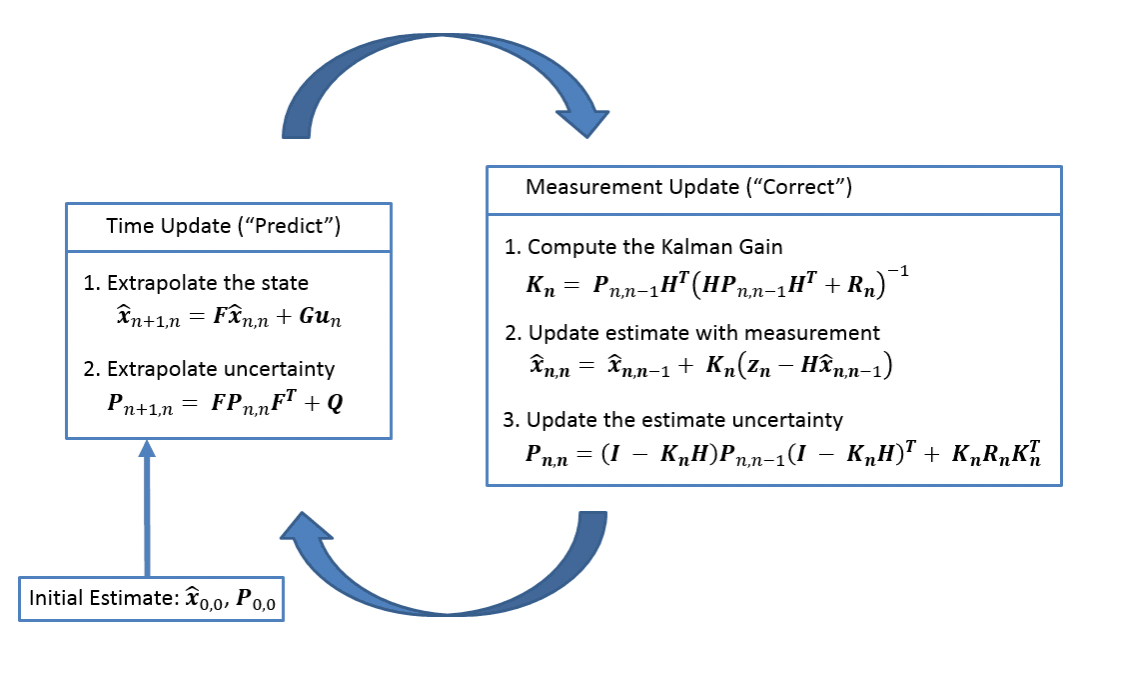
Is the most optimal for pitch plane co ntrol of an ELV in the boast phase. Boldsymbolhatx_n1n Fhatx_nn Ghatu_nn In order to get there we shall solve the differential equation that describes the state space representation. The Analysis of the Demand and Supply Model of Medium-size Scooter Market in Taiwan.
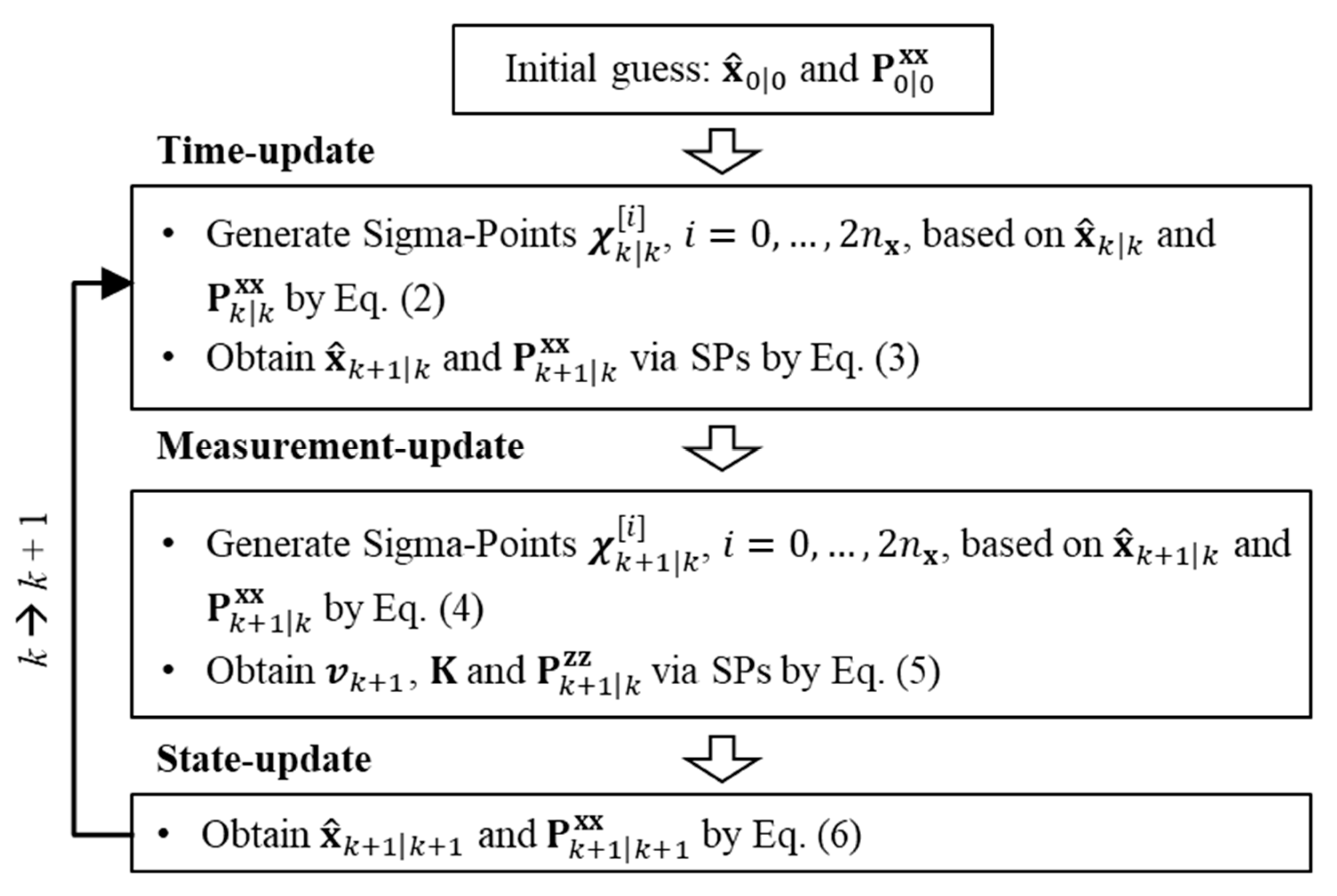
Remember for our Kalman Filter model we need to determine the state extrapolation equation in the form of. It is required that after. Extended Kalman Filter Lecture Notes 1 Introduction 2 DiscreteDiscrete EKF k k k k j k R k k R k R k R k k R k k k R k k R k In this lecture note we extend the Kalman Filter to non-linear system models to obtain an approximate filterthe Extended Kalman.
R 1 is the matrix of in v erse squared v ariances ie. 2 k z h a. 18a ψ k A ψ k 1 w k 1 18b z k H ψ k ν k.
All you need is to obtain the Jacobian matrix first-order partial derivative of a vector function with respect to a vector of each model in each time step as. Up to 10 cash back Once the structure form of demand and supply is translated into areduced form one can solve the reduced form with a state space modelof the Kalman filter Applying Kalman Filter on Solving Simultaneous Equations with Overidentifying Rank Restrictions. Kalman filter as one of various modifications of the Kalman filter can be used to estimate the state with the non-linear measuring equations effectively.
Extending the linear Kalman filter to solve the problem of trajectory estimation. Kálmán one of the primary developers of this theory which is extensively used for many applications. The covariance matrix P in equation 4 is the solution to a Riccati Differential Equation RDE or an Algebraic Riccati Equation ARE.
The Kalman filter is a set of mathematical equations that provides an efficient com-putational recursive solution of the least-squares method. Riccati Differential Equation for the implementation of Kalman filter in LQG controller design. The classical Kalman filter is applied to a dynamical process governed by a linear stochastic difference equation and by an equation relating the state variable with some measurements z.
Kalman filter is an algorithm named after Rudolf E. Since xtYt are jointly Gaussian we can use the standard formula to find xˆtt and similarly for xˆt1t xˆtt xt ΣxtYtΣ 1 Yt Yt Yt the inverse in the formula Σ1 Yt is size ptpt which grows with t the Kalman filter is a clever method for computing xˆtt and xˆt1t recursively The Kalman filter 813. The Gaussian model Assume that the noise sequences fwkg fvkg and the initial conditions x0 are.

Iir Filter Design Matlab Simulink Filter Design Design Filters

Pdf A Tutorial On Implementing Kalman Filters With Commonly Used Blocks
Pdf Invariant Kalman Filtering
An Easy Explanation Of Kalman Filter By Renu Khandelwal Mar 2022 Medium

Http Www Parallemic Org Rokisim Html Industrial Robots Robot Simulation

5 Types Of Data And How To Analyze Them With Matlab Data Analyze Type

Sensors Free Full Text A Novel Kalman Filter Design And Analysis Method Considering Observability And Dominance Properties Of Measurands Applied To Vehicle State Estimation Html

Kalman Filter Derivation Youtube

Kalman Filter Derivation Youtube

Special Topics The Kalman Filter 5 Of 55 A Simple Example Of The Kalman Filter Youtube
Applied Sciences Free Full Text Regularization Based Dual Adaptive Kalman Filter For Identification Of Sudden Structural Damage Using Sparse Measurements Html

Pdf An Introduction To Kalman Filter Semantic Scholar

Schematic Diagram Of The Unscented Kalman Filter Loop Download Scientific Diagram

Timing Diagram For The Sampled Data Extended Kalman Filter The Download Scientific Diagram
An Easy Explanation Of Kalman Filter By Renu Khandelwal Mar 2022 Medium
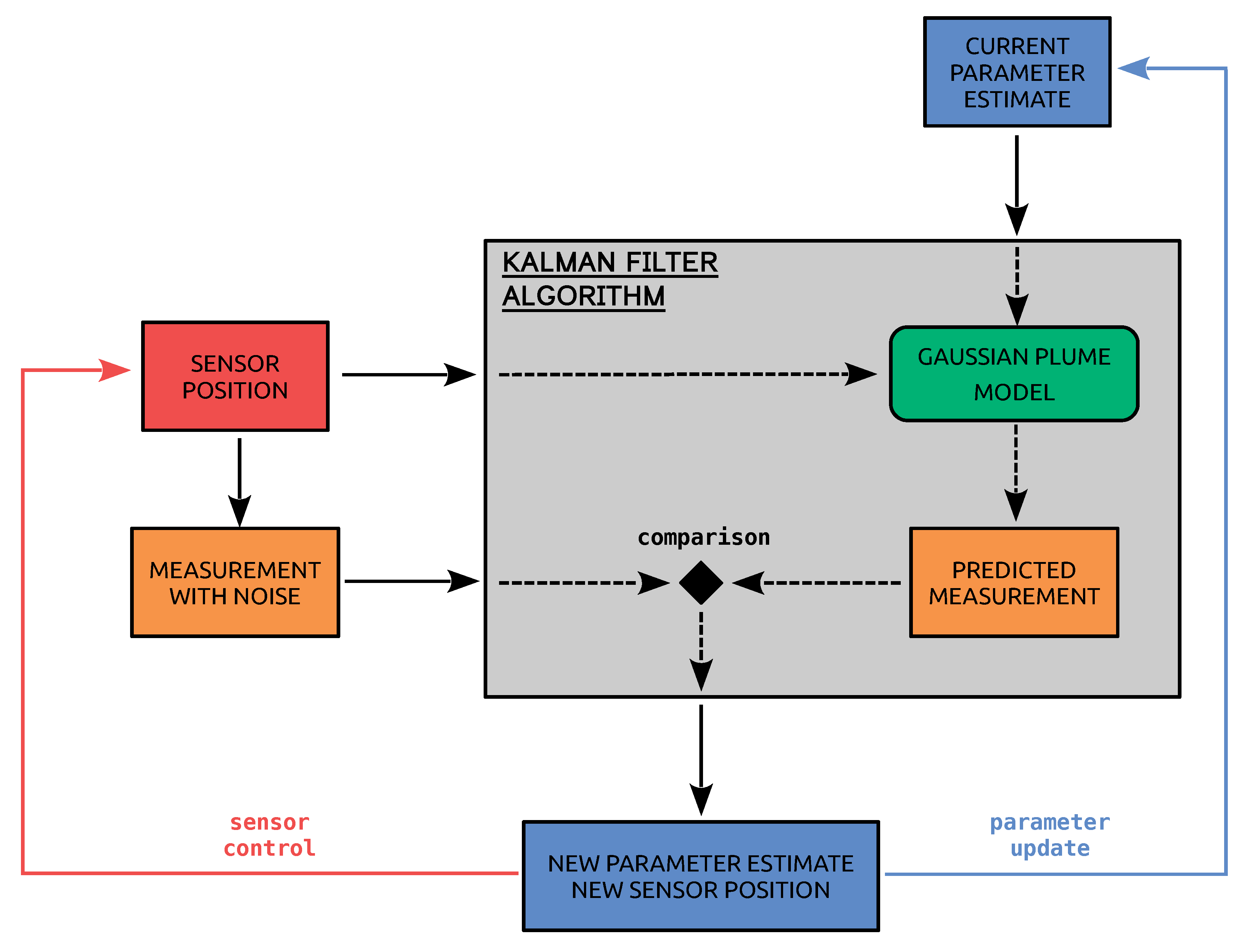
Sustainability Free Full Text A Kalman Filter Based Approach For Online Source Term Estimation In Accidental Radioactive Dispersion Events Html

Water Free Full Text Use Of The Kalman Filter For The Interpretation Of Aquifer Tests Including Model And Measurement Errors Html

Pdf An Introduction To Kalman Filter Semantic Scholar

Ladvfzicvpa1vm



Comments
Post a Comment